De oplossing van Rob van dit vraagstuk:
Mooie resultaten, de meeste opmerkingen zijn redelijk tot goed... Kijk zelf maar welke dat zijn en uiteraard hoor ik graag of jullie het met mijn analyse eens zijn.
Vraag 1: 1 of 2 sensoren.
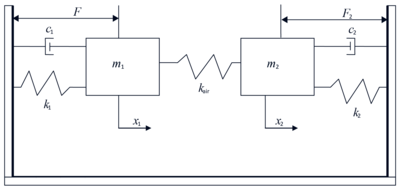
In eerste instantie beschouw ik het systeem als ideaal, opgebouwd volgens het volgende “Lumped Element Model” Hierbij zijn beide drivers samen in een kast gebouwd:
- Dualcone.PNG (11.52 KiB) 419 keer bekeken
Hierbij zijn m1 en m2 de beide conussen, die ieder aangedreven worden door een kracht vanuit de spreekspoel. k1 en k2 is de stijfheid van de rolrand en spider van beide conussen, c1 en c2 is de demping van beide drivers (groot bij spanningssturing en klein bij stroomsturing) en kair is de stijfheid van de lucht in de kast.
In het echte systeem zitten beide conussen aan weerszijden van elkaar in de kast
Dit mechanisch dynamische systeem is een vierde orde systeem en dat heeft twee eigenmodes, trilvormen die ieder apart bestudeerd kunnen worden met hun eigenfrequentie (vrije resonantie).
De eerste eigenmode met de laagste eigenfrequentie is die waarbij de conussen samen in de zelfde richting heen en weer bewegen, waarbij de lucht in de kast en dus ook kair niet wordt samengedrukt.
De totale bewegende massa m1+m2 werkt in deze eigenmode dus met de totale veerstijfheid k1+k2 wat een eigenfrequentie geeft van f=1/2π√((k1+k2)(m1+m2)) wat bij gelijke drivers (m1=m2 en k1=k2) het volgende resultaat geeft f=1/2π√(k/m). Dit is niet onverwacht gelijk aan de door de fabrikant in het datablad opgegeven resonantiefrequentie van de driver in de niet-ingebouwde toestand. Deze eigenmode wekt nagenoeg geen geluid op (dipool op ca 20 Hz) en is daarom minder schadelijk al moet je ervoor zorgen hem niet op te wekken.
De tweede eigenmode is de mode waarbij de conussen tegenovergesteld bewegen (bouncing) waarbij de luchtstijfheid kair wel een rol speelt en opgeteld wordt bij k1 en k2 wat een hogere eigenfrequentie geeft. Dit is dezelfde frequentie als wanneer een driver in een kast met het halve volume wordt gemonteerd.
In het geval dat dezelfde identieke drivers met een identieke kracht worden aangedreven, zodanig dat alleen de tweede eigenmode wordt geëxciteerd, dan zullen beide conussen exact de zelfde beweging maken en is een sensor voldoende om het gedrag van beide drivers te bepalen en in tegenkoppeling te corrigeren.
Je kan ook de kast splitsen in twee ruimtes met een tussenschot. Dat geeft exact dezelfde resultaten zolang je dat schot precies op de plek doet waar kair niet beweegt. Bij een volledig symmetrisch systeem is dat in het midden. Echter wanneer een van de massa’s kleiner is dan de andere dan zal die meer bewegen dan de zwaardere (zelfde kracht) en is het stilstaande punt op kair dus niet meer in het midden. Mocht je dan toch (zoals zovelen op het web beweren) besluiten om de drivers ieder in een gelijke kast te zetten terwijl de drivers niet meer identiek zijn (wat zo is, je hebt er immers een versnellingsopnemer ingebouwd wat zowel de massa, de stijfheid (draden) en wellicht de demping (isolatie, lijm) beïnvloedt) dan is je meting niet meer helemaal representatief voor de driver zonder sensor. Het meest ernstig is daarbij dat de resonantiefrequenties niet meer gelijk zijn wat vooral bij stroomsturing een issue is. Als je MFB regelaar dan de resonantiefrequentie van de gemeten driver compenseert dan krijg je bij de niet gedreven driver op die plek een dip met daar vlak naast een piek. En dat rond ca 40-50 Hz. Dat geeft een dramatisch slechte impulsrespons. Bij gedeelde kasten en stroomsturing moet je dus per kast een sensor met een eigen MFB feedbacklus gebruiken. Bij spanningssturing is het probleem een stuk kleiner doordat de resonantiepiek minder hoog is en daarmee kan je wel met aparte kasten werken en hebben de mensen op het internet dus gelijk omdat ze altijd met spanningsversterkers werken.
Bij inbouw in een gezamenlijke kast speelt dit probleem niet omdat ze dan samen één resonantiefrequentie hebben voor de tweede eigenmode, waarbij de gemeten conus hooguit ietsje minder beweegt dan de niet gemeten conus. Het totaalresultaat is echter nog steeds proportioneel met het gemeten signaal dus is één sensor voldoende.
Vraag 2: Spannings of Stroomsturing
Wanneer beide drivers gelijk zijn dan kan je zowel bij spannings als bij stroomsturing de drivers zowel in serie als parallel schakelen. Ze voeren immers dezelfde stroom en hebben dezelfde bewegings-EMK en dus dezelfde spanning (I*R+bewegings-EMK).
Bij afwijkende eigenschappen geeft dat een kleine fout waardoor het optimaal is om bij stroomsturing in serie te werken en bij spanningssturing parallel. Het is echter aanzienlijk minder erg om het anders te doen omdat dit alleen effect heeft op de demping van de resonantie maar niet op de eigenfrequentie. Dat is als volgt in te zien:
Bij spanningssturing krijgen beide drivers dezelfde spanning van de versterker. Als ze parallel staan "zien" ze elkaar niet eens door de 0 ohm impedantie van de versterker en is de demping van elke driver apart bepaald door hun bewegings-EMK (de snelheidsafhankelijke spanning die opgewekt wordt in de spreekspoel) en hun inwendige weerstand omdat de kortsluitstroom de bewegingsenergie in warmte omzet in de inwendige weerstand. Als ze in serie staan dan tellen hun bewegings-EMK waarden op maar ook hun inwendige weerstand. Als de ene conus een beetje meer beweegt en de andere een beetje minder dan is de som van de bewegings-EMK waarden vrijwel onveranderd en dus wordt er vrijwel evenveel energie uit de resonantie gedissipeerd in de beide serieweerstanden als wanneer ze parallel zouden staan.
Bij stroomsturing in serie krijgen beide drivers dezelfde stroom, ideaal dus. Parallel geschakeld wordt het iets ingewikkelder omdat er nu twee spanningsbronnen (bewegings-EMK) tegenover elkaar staan in een circuit en het verschil in spanning tussen beide drivers een stroom laat ontstaan door de som van beide inwendige weerstanden. Dit lijkt contra intuïtief omdat de spoelen parallel staan maar voor de bewegings-EMK staan ze in serie omdat de versterker daarvoor een hoogohmige belasting is en dus weggedacht kan worden. Bij 10% verschil in beweging (wat al veel is) krijg je een dempingskracht die 10% is van de waarde bij een spanningsversterker. Dus als bij spanningssturing de Q=0.7 zou zijn en bij perfecte stroomsturing Q=10 dan zou die door de 10% verschil gelijk aan Q=7 worden. In de praktijk zijn de verschillen kleiner.
Dan tenslotte vraag 3: Wat is beter? Een of twee sensoren
Bij inbouw in aparte kasten moeten bij stroomsturing aparte sensoren gebruikt worden tenzij de drivers perfect identiek zijn.
Dus wat kan er misgaan met één sensor in een gezamenlijke kast?
Bij grote uitslagen worden drivers extreem niet lineair. Als de sensor op de zwaarste conus zit zal de niet gemeten conus meer uitslag maken en dus meer vervormen. Bij 2 sensoren wordt de som van beide sensoren als gezamenlijk meetsignaal gebruikt waardoor de drivers samen door de regelaar worden gedwongen de extra vervorming van de lichtste conus te compenseren. Dat gaat prima omdat de totale geluidsdruk proportioneel is met de som van de beweging van beide conussen.
Het is dus van belang bij het toepassen van een enkele sensor de verschillen in eigenschappen niet te groot te laten zijn (<5%). Lichte sensoren, zoals Murata, zijn dus in het voordeel.
Samenvattend: Bij stroomsturing kan je twee drivers alleen maar bij elkaar in een kast doen. Omdat stroomsturing beter is door de lagere vervorming boven de resonantiefrequentie is dat de voorkeurssituatie bij MFB en twee drivers.